Well, it has indeed been quite a long time since I wrote here the last time.
My personal situation has changed in such a way that it is hard to find the time to share my views and to comment your feedback on current advances in the GNSS R&D domain.
However I feel like dropping here an "end of the year" summary which serves more as a memorandum to me that anything else.
I might be challenging this article
http://gpsworld.com/2013-a-positive-year-for-location-industry/but 2013 has not been a very good year for GNSS.
At least someone generally agrees:
http://qz.com/161443/2013-was-a-lost-year-for-tech/#!Mass market receivers for low cost RTKLately there was one more item on the acquisitions list:
The above shows how aggressive this market is and leaves just a few players on the field.
Some of them, such as Intel, Qualcomm and Broadcom don't really sell to private and just target device manufacturers. Others have shelves as well and those are the most interesting for people thinkering with GNSS of course.
In no particular order:
MediatekEarly in 2013 Mediatek announced
MTK3333. This powerful true dual constellation receiver can be found in many modules (for example by
Locosys and
GlobalTop. Although impressive, it does not seem to offer pseudoranges or carrier phase at the moment.
uBloxIMHO, uBlox has a confusing roadmap with
6th generation modules overlapping with
7th generation and now apparently
8th generation. I design with uBlox modules and it is a little awkward to tell my customers that modules already advertised for are due for release in 6 months. The Company has done an aggressive marketing of a "PPP" technology that has nothing to do with Precise Point Positioning, but rather with carrier phase smoothing. uBlox still manages to sell navigation modules which are not
true dual constellation but
either one or the other constellation. Their "P" and "T" modules have well established pseudorange, carrier phase and more measurements
for GPS.
ST-MicroelectronicsSTM has released in 2013 the TeseoII
true dual constellation IC. The
STA8088FG is 7x7 mm and is very capable. Pseudoranges can be obtained with some firmware, but never carrier phase. Carrier phase is rumored to be available in Teseo3, which is to be released next year. STM is more open to Galileo than any other Company, but it is weird to find their GNSS products under "Automotive Infotainment and Telematics" category.. not that STM website is an easy one to navigate anyway.
NVSNVS continued to innovate in 2013 by releasing new FW for their NV08C-CSM and -MCM modules. However, after the
press release of compatibility with the popular precision navigation software RTKLIB, they went quiet. By the way, I wrote the support driver for their receiver into RTKLIB but never received a mention.. you are welcome. Next year NVS will release a new hardware revision of their modules, but nothing is told about changes to expect against the current. I have high expectations :)
Geostar NavigationThis Company was pretty new to me and
came as a surprise in 2013. It offers a
true dual GPS+Glonass
receiver module. In my opinion has still to improve in terms of reliability but the preconditions are all good (website is updated often so at least the Company seems well up and running). Rumors want Geostar-Navigation to release a pseudorange and carrier phase capable firmware (for GPS at least) very soon.
FurunoFuruno came back in 2013 with a
true dual constellation chipset called
eRideOPUS 7 and module called
GN-87F. The Company has expressed interest in releasing Galileo compliant firmware soon and the chip seems to be able to output pseudoranges, but not carrier phase.
CSRCSR has finally delivered
a new standalone receiver IC, the
SiRFstarV 5e. I bought the Telit
Jupiter SE868 V2 (quite a mouthful) evaluation kit from Rutronik. I still did not have a chance of testing it out in real environment but it does track simultaneously GPS, SBAS and Glonass. The chip seems to be very swift and surely has best in class power consumption, but SiRF already departed from raw measurements path with their 3rd generation so I would not expect them to be back on that track now.
SkytraqLast but not least, Skytraq was among the first ones to release a
true dual constellation chip and module with the intention of supporting raw measurements. I bought some
S4554GNS-LP back in 2011 already. Since then the Company has made a great progress in integration and quality of modules. The latest generation, the
Venus8, has GPS 50Hz measurements, or GPS+Glonass at 20Hz. As all new modules comply with the uBlox NEO format, I already had a chance of integrating some
S1216F8, S1216F8-GL and S1216F8-BD. Whilst not tested in the field but "only" with an Agilent GNSS simulator, these modules represent for me the greatest promise for 2014.
All GNSS enthusiastics should check out the NavSpark:http://igg.me/p/603168/x/5902022Although I am not a crowdfunding enthusiastic (see later as well) the news is that it is possible to get at least an evaluation kit (with libraries) for this powerful baseband processor for USD 199. There is a lot of room to play for sure, and 50Hz GPS raw measurements for less than USD 20 a module will buzz for sure. GNSS Software Defined RadiosLooking out for interesting devices to use for GNSS SDR, this year has been a promising one. But not all promises are kept, as I will explain below.
Memoto Camera![]()
One year ago already, following the hype of the
Cell-guide snapshot GPS technology, I decided for the first time to back a kickstarters project:
the Memoto camera. This "lifelogging device" has an Aclys chip inside which will only turn on for a few milliseconds every so often and record a GPS signal snapshot, in order to achieve the lowest possible battery life. After more than 1 year not only I did not received the camera but my contact has been lost in the
transition from Memoto to Narrative. Being my support request unanswered, it is hard to know wheter I have lost my pledge or not... fingers crossed.
Jawbreaker -> HackRF One![]() Michael Ossmann
Michael Ossmann, creator of the Ubertooth, started developing other interesting devices for low cost SDR. I missed by very little the
Jawbreaker giveaway back in June, so I decided to support its
Kickstarters campaign for HackRF One, which is essentially the same object but not free and with 8 months more on its shoulders. Whether this time has actually served to real innovation or just made Michael more popular (at least well deserved in his case) and
rich.
My plans of using HackRF One for GNSS record and playback are a little pushed back by the fact that it is a half-duplex design, although I see some potential by properly hopping between TX and RX.If and when I receive the thing.
Nuand BladeRF![]() BladeRF
BladeRF was probably the greatest disappointment so far. It mounts
- the Lime Microsystems LMS6002D, a fully programmable RF transceiver capable of full-duplex communication between 300MHz and 3.8GHz
- an Altera Cyclone 4 with options at 40KLE or 115KLE
- a Cypress FX3 microcontroller
Sounds like the perfect board to have a
GNSS receiver on FPGA, and a real-time continuous-time record and playback device. I received the boards back in Summer and was never really able to have them working reliably. I installed the Ubuntu several times, until now 13.10 seems to have native support at least for the libusb version they link to. Things might change tomorrow, but it has been six months of bleeding so far. Essentially the software is not stable. BladeRF might even work as a 450 USD spectrum analyzer once you install a leviathan like Gnuradio. But it won't work for me if it misses packets once in a while, if it randomly switches the I and Q channel, if it cannot tune to 1.5GHz in TX mode, if it works only with Renesas and NEC USB 3.0 hosts.
SwiftNav Piksi![]()
Two bright guys, Fergus Noble and Colin Beighley founded
Swiftnav and started developing Piksi, an "open source" GPS receiver for RTK implemented as a combination of a Spartan6 9KLE FPGA and STM32F4 168 MHz Cortex-M4 MCU. Swiftnav "kickstarted"
Piksi back in the Summer, when I already had a sample of it. Unfortunately once the campaign was funded (and I was one of the backers of course) there has been little development on the software side. Sure, more boards were manufactured to address sales but Swiftnav customers are not yet able to see how the
RTK engine will look like, nor they have visibility of the
FPGA correlators code.
Actually those two are two valuable pieces of software so I cannot hide my sceptictism in believing the promised Open Source nature of the venture.
Before I publish here anything about Piksi, I need to be provided a simple way of
- recording data with the board connected to a perfect antenna.
- converting the recorded stream into Rinex OBS
IMHO, those two are the fundamentals when a Company plans to sell a RTK capable receiver. It does not have to be small, to be low power, to have an embedded antenna if carrier phase isn't rock solid to begin with.
Very recently Swiftnav published a video (filmed in August, so why now?) where they show differential accuracy on the rooftop of their office building.. but that seems a very poor reward for three months of Github silence (
1) (
2).
I sent Fergus and Colin two pieces of the most recent Rap10LogWi release
asking them to try their RTK engine (I used their same MCU) on a bullet-proof low cost GPS receiver as the
uBlox NEO6T.
I have not received any feedback so far.. I know they are busy investing their reward, but I think their customers (and I) need a bit of delivery of credibility at this point.
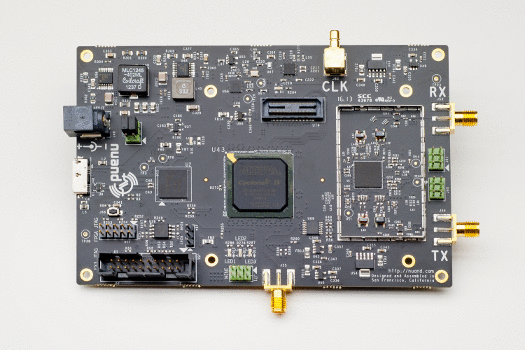
Ettus USRP B2x0![]()
Probably the savior of my 2013 SDR hopes, the
B2x0 boards from Ettus tick many boxes. They are a little expensive maybe, but they are supported by the UHD driver which has a huge community behind. How did Ettus manage to pull off a deal with Analog Devices and integrate first the super powerful
AD9361 I don't know. The
TI AFE7070 came close sometime this year in terms of chip integration, and the above mentioned
LMS6002D (with its awkward footprint) even closer, but that ADI chip seems unbeatable right now. The Spartan 6 75KLE seems also large enough to run several channels of a GNSS receiver already. I will have access to a couple of these boards very soon and I cannot wait.
...TBC